")
")
Produse și servicii cu potențial inovativ
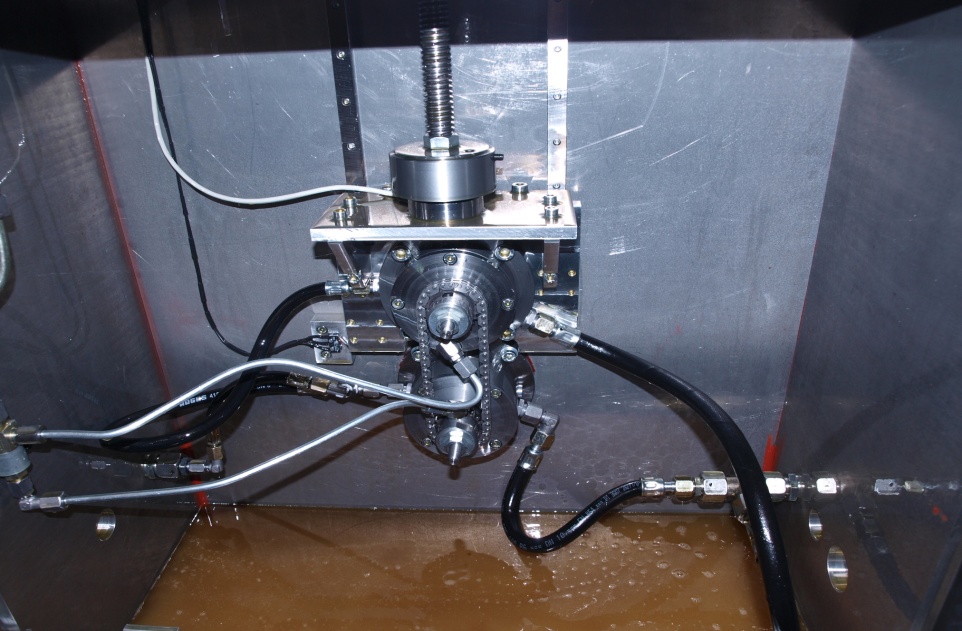
• Procedură, instalație și dispozitive pentru măsurarea pierderilor prin frecare din transmisii cu axe paralele (lanțuri, curele, angrenaje) în funcție de viteza medie, încărcare și caracteristicile lubrifiantului
Procedura se bazează pe măsurarea momentului de frecare global dintr-o transmisie, măsurarea separată a momentului de frecare din lagărele transmisiei, momentul de frecare din transmisie rezultând ca diferență dintre momentul global și momentul din lagăre. Se utilizează un stand dotat cu senzoristică dedicată pentru moment de torsiune, turație, forte de tensionare, temperatură și presiune în circuitele de ungere. Standul are o geometrie configurabilă pentru testarea separată a lagărelor (cu ajutorul unor dispozitive și cuplaje dezvoltate in-house). Evaluarea corectă a pierderilor prin frecare este o parte integrantă din procesul de reducere a pierderilor energetice din sistemele mecanice.
Acestea au fost aplicate cu success pentru testarea a mai mult de 10 tipuri de lanțuri în perioada 2013 – 2018.
• Proceduri și dispozitive pentru măsurarea coeficienților de frecare din cuple mecanice cu frecare, în funcție de tipul cuplei, viteza medie, încărcare, cu și fără ungere
Cercetarea pe această direcție se bazează pe un tribometru UMT cu 4 module separate: modul pin on disk; modul reciprocating: modul block on ring; microdurometru.
Cu ajutorul unor scule și dispozitive dezvoltate in-house pot fi măsurați coeficienți de frecare pentru diverse tipuri de cuple de frecare, pentru diverse tipuri de mișcări relative, cu sau fără ungere:
- dispozitiv pentru măsurarea coeficientului de frecare din articulațiile bolț-bucșă ale lanțurilor cu bucșe. Au fost determinați coeficienți de frecare, corespunzători unor condiții specifice din funcționare: în mișcarea oscilatorie de rotație, cu viteze periferice maxime de 0,2 m/s, forțe de apăsare în domeniul 10...300 N, ungere prin picurare.
- dispozitive pentru măsurarea coeficientului de frecare dintre eclise și patină de apăsare, în funcție de viteză, forță de apăsare și temperatură. Au fost determinați coeficienți de frecare, corespunzători unor condiții specifice din funcționare: 1 - în mișcarea oscilatorie de translație, cu viteze de 0...0,3 m/s, forțe de apăsare în domeniul 10...20 N, ungere în baie sau fără ungere; 1 - în mișcarea circulară de translație (pe disc), cu viteze de 0...7 m/s, forțe de apăsare în domeniul 10...20 N, ungere în baie sau fără ungere.


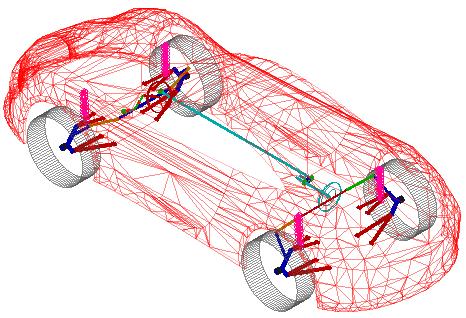
• Modelarea, simularea, optimizarea si testarea experimentala a unor sisteme din componenta autovehiculelor rutiere
Cercetarea din ultimul timp a fost orientată spre: sisteme de suspensie (in varianta suspensie pasiva si suspensie activa, pentru rotile directoare si respectiv nedirectoare), sisteme de directie (inclusiv in varianta directie integrala), sisteme de stergere a parbrizului, sisteme de siguranta (ex. sisteme de reducere a tensiunilor in centurile de siguranta). Cercetarile in aceste domenii s-au concretizat de-a lungul anilor in numeroase articole publicate in reviste cotate ISI, reviste si volume indexate BDI/ISI, carti publicate in edituri nationale, capitole in carti publicate in strainatate, granturi si contracte de cercetare nationale (inclusiv cu beneficiari din industria auto - ex. Autoliv Romania), brevete de inventie acordate / propuneri de brevete de inventie, teze de doctorat.

• Gamă de prehensoare antropomorfe reconfigurabile pentru roboti industriali
O direcție importantă de cercetare a urmărit dezvoltarea unor soluții inovative de prehensoare modulare, antropomorfe, reconfigurabile pentru roboți industriali. Au fost dezvoltate numeroase variante dintre care menționăm: prehensor cu 3 degete si 2 configuratii; prehensor cu 3 degete și 4 configurații; prehensor cu 3 degete cu reconfigurabilitate continuă medie; prehensor cu 4 degete și 5 configurații.
Pot fi livrate mărimi diferite față de dimensiunea mâinii umane, la cererea beneficiarului: mai mari, pâna la de 2,5 ori dimensiunea mâinii umane sau mai mici până la 0,25 din dimensiunea mâinii umane.